
About me
Truly the light is sweet, and it is pleasant for the eyes to behold the sun; But if a man lives many years and rejoices in them all, yel let him remember the days of darkness, for they will be many. Allthat is coming is vanity.

Project Leader & Researcher
It's time to rethink the way we make technology our ally. It is necessary to think of technology as an art. And art is something changeable, without limits, without owners.
- Birthday: March 1971
- City: Curitiba - PR, Brazil
- Age: 53
- Degree: Master
Senior Engineer and Researcher with more than 20 years of experience in industrial project management and R&D, including the implementation of two automobile plants in Brazil as well as in steel making and power generation. Develops robotic and manipulator tool designs, autonomous vehicle system, asset management, RCM, TPM, reliability and maintenance of critical equipment, and evaluation in FMEA application. In recent 10 years he has worked in development robotic projects.
Facts
A project can be difficult due to reasons such as cost, time and people, but that does not automatically mean that the project is complex. A complex project is not necessarily a difficult project. Complexity refers to projects that include ambiguity or uncertainty. They are surrounded by unpredictability. But the facts show how far they can be developed.
Skills
Changes are commonplace nowadays. This new reality has impacts on both individual and professional life, so it is necessary for the professional to develop skills in this new coming and going of humanity. Skills are expressions of know-how.
Resume
Project Leader & Robotics Researcher with 10+ years of experience designing and developing robotics systems. In addition, he teaches classes at the undergraduate and graduate levels, he has also been mentoring young engineers on the path to automation and especially in a robotics training program he has developed over the past 4 years, based on the principles of Shawn Achor (The Happiness Advantage) and Daniel Coyle (The Talent Code).
Education
Master of Production Engineering
2001 - 2003
Universidade Federal de Santa Catarina, Florianópolis, SC
Study on the evaluation of the performance criteria of a manufacturing production, quantifying the perception of the internal Quality that interacts on the product of the automobile industry.
Electronic Engineering
1989 - 1995
Universidade Federal do Paraná, Curitiba, PR
The course conclusion culminated with the development of a text-to-speech converter for Portuguese when computers had a maximum of 1M ram.
Professional Experience
PMO Manager | Data engineer
2022 - 2024
DNA de Vendas, Salvador, BA
- Implementação do PMO.
- Adequação e automação de processos (RPA).
- Estruturação e adequação de dados.
- Sistematização de dados na geração de informações.
- Elaboração de dashboards e relatórios (ecosistema Google).
Project Leader & Robotics Researcher
2012 - 2022
BIR - Brazilian Institute of Robotics - Senai Cimatec, Salvador, BA
- Lead in the project management, development, and implementation robotics systems
- Research robotics reliability applied in complex systems, fault tolerance and mobile robots
- Mentoring in robotics and automation researching
- Advisoring researching fellows in robotics
- Lecture in graduation and post-graduation engineering courses
- R&D Project Leader in robotics
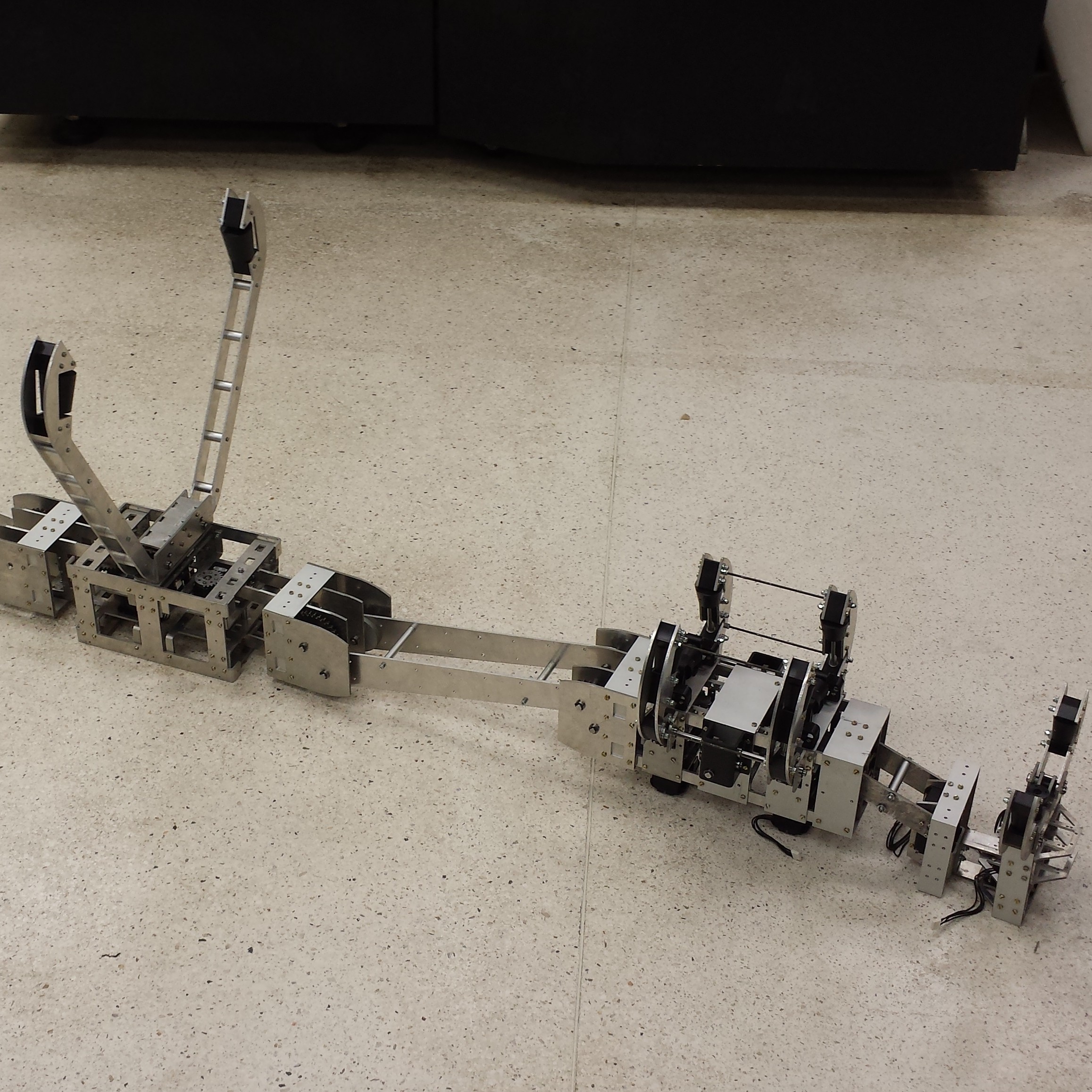
- Power line inspection robot (phase I - 2011 - 2014)
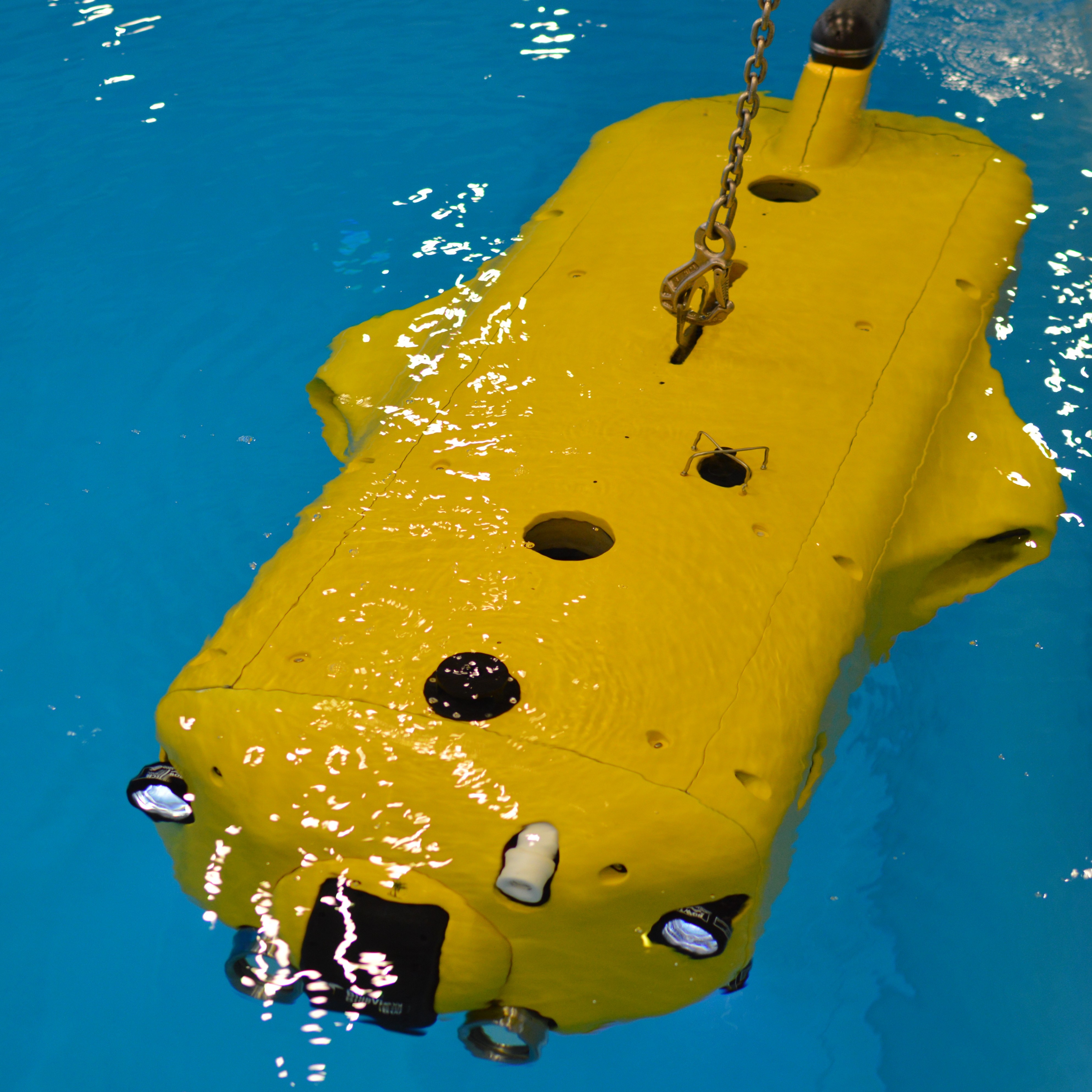
- Flatfish – AUV (phase I - nov/2013 - may/2016)
- Flatfish – AUV (phase II – jun/2016 - dec/2017)
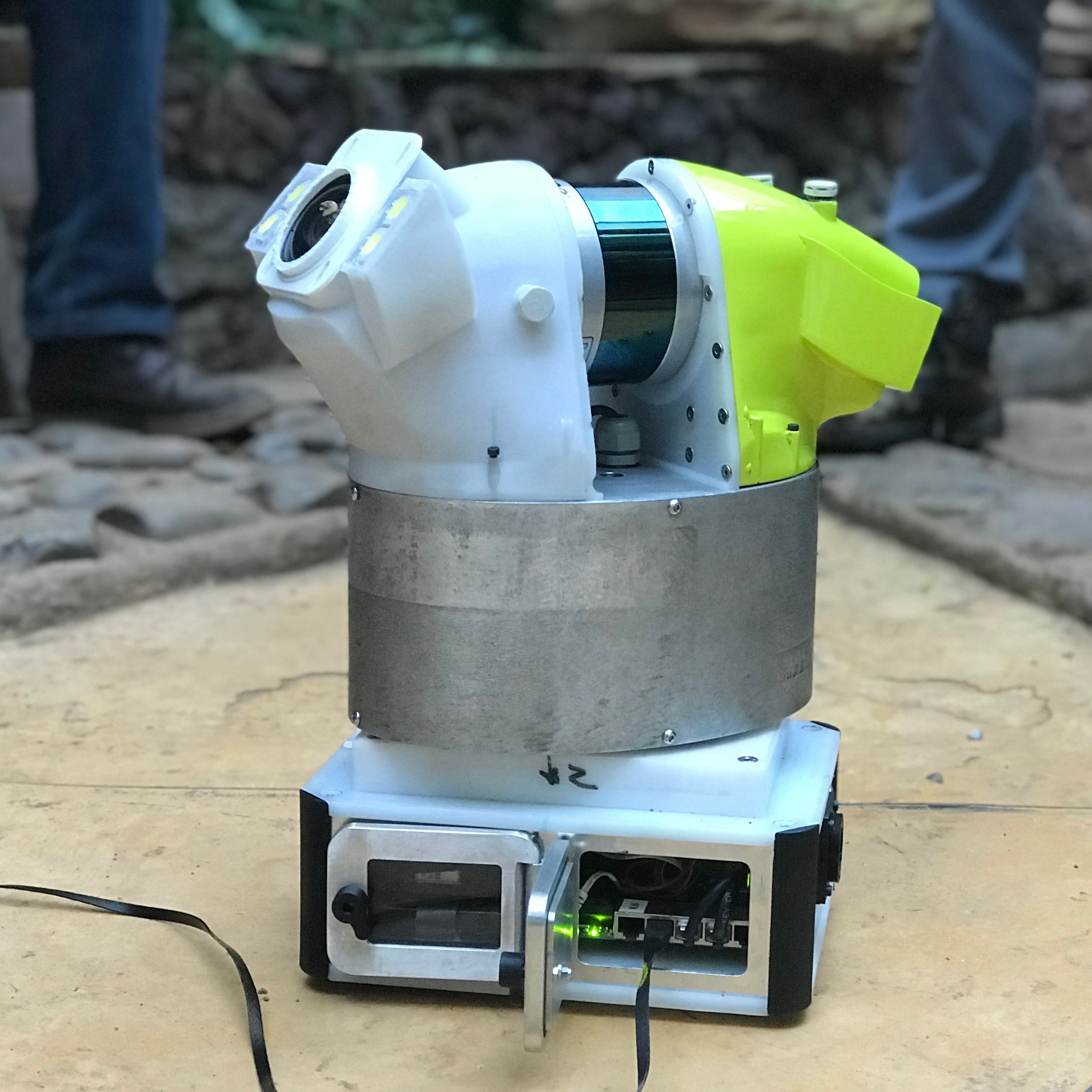
- Speleorobot – mobile vehicle to inspection caves (mar/2016 - mar/2018)
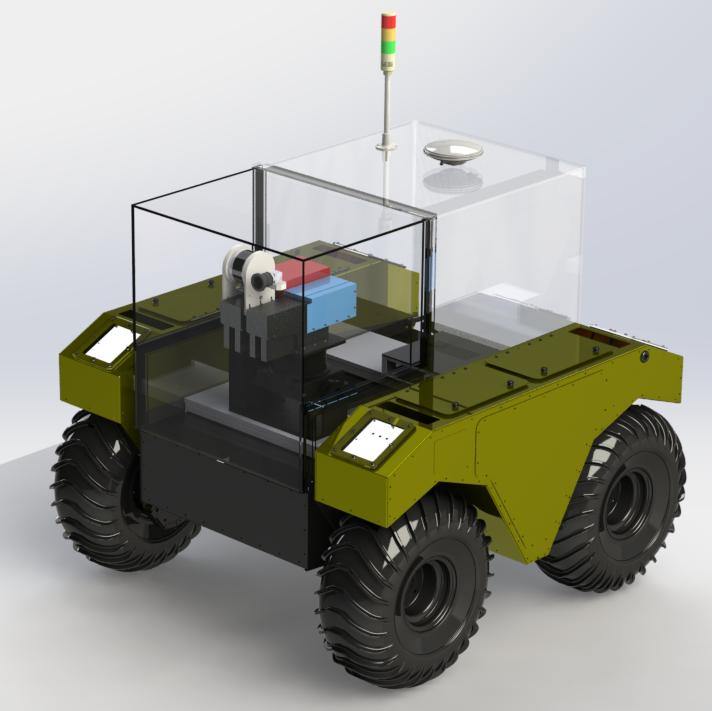
- Mining Qualification – mobile vehicle and hyperspectral cams (mai/2016 - dec/2018)
- Electrical inspection robot (jun/2017 - dec/2018)
- Steering Assist System – ADAS (mar/2016 until may/2019)
HQ Engineering Manager - O&M
2011 - 2012
Skanska, São Paulo, SP
Bussiness Manager - Automation
2008 - 2010
Senai Cimatec, Salvador, BA
Regional Engineering Coordinator
2001 - 2008
ABB, Camaçari, BA
Automation&Robotics Engineer - O&M
1998 - 2001
Renault do Brasil, São José dos Pinhais, PR
Projects
The projects are expressions of the individual's imaginary vision, they are directly related to the sensations and emotions experienced. Below is a list of projects that were conceived based on these parameters that are so individualized and at the same time so comprehensive in their conception, always pursuing a more humanist vision of knowing how to do.
- All
- Industrial
- Academic





In addition, there is a Youtube channel with some of the activities that have been developed.
If you want a pdf version of my resume, just click on this link.
The Fellows
Jump over the void. Jump from peak to peak. Don't be afraid of the fall.
That's how science was built, built. Not for the prudence of those who march, but for the daring of those who dream.
For the daring of having a crazy idea. And it is these ideas that dance in the heads of those who dare to think differently. Make the difference.
Those who are here, were or still are fertile ground for the words arising from my thoughts. They were or are researchers led by my motivating whispers. And just like them, I am the words that others planted in me.
I am the gap between my desire and what the desire of others has made of me.
- All
- 2014
- 2015
- 2016
- 2017
- 2018
- 2019
- 2020
- 2021
- 2022






















































Research Lines
The study and development of technologies related to robotics continues to be a very relevant topic in the field of science and technology.
The evolution of this technology involves the interdisciplinarity of engineering: electrical, electronics, mechanics and automation (noting that there is still no robotics engineering). Often understood as multidisciplinary, these engineering ends up not understanding the nuances of the Robotics theme; therefore, complementarity is a crucial fact for a good understanding and assimilation of the technologies involved, showing that engineering must be overlapped and not partitioned.
Understanding this concept is fundamental for the implementation of competence and its parameters.
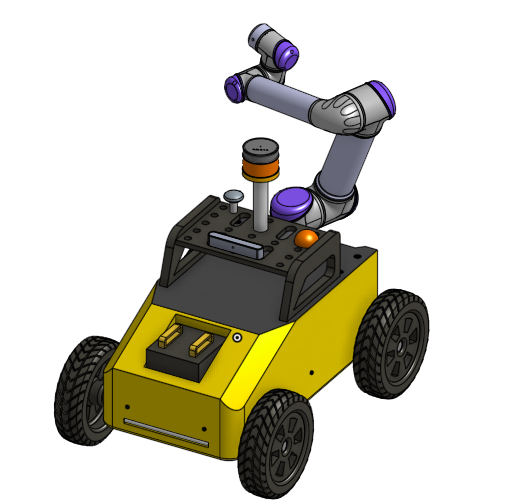
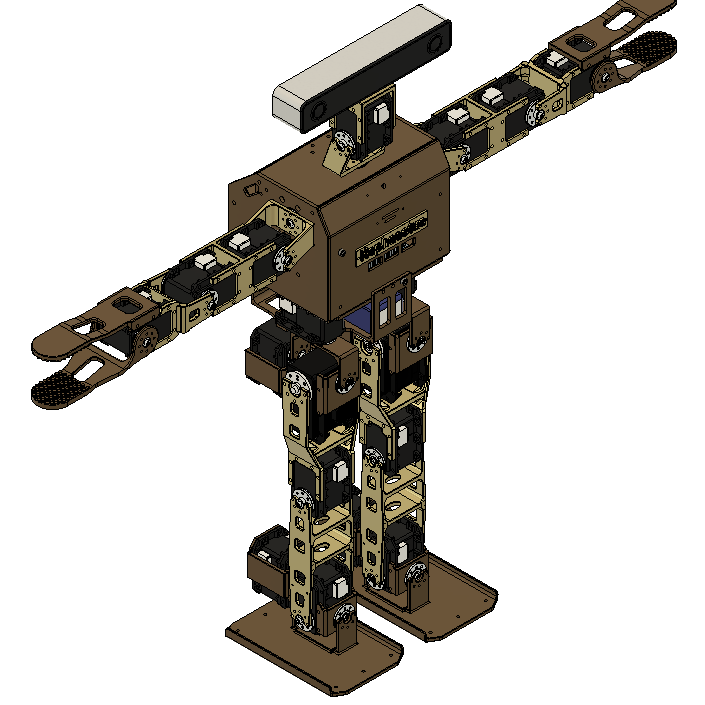
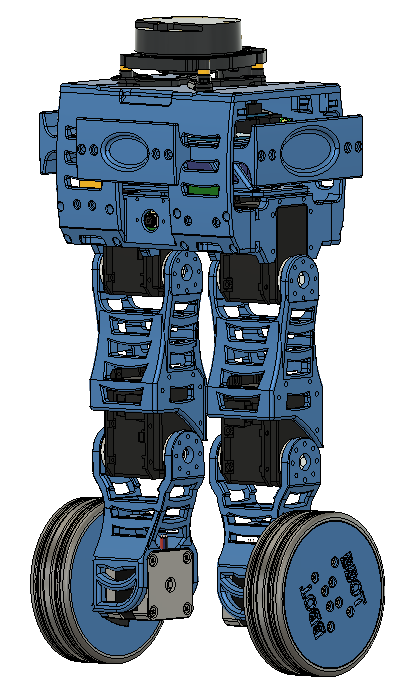
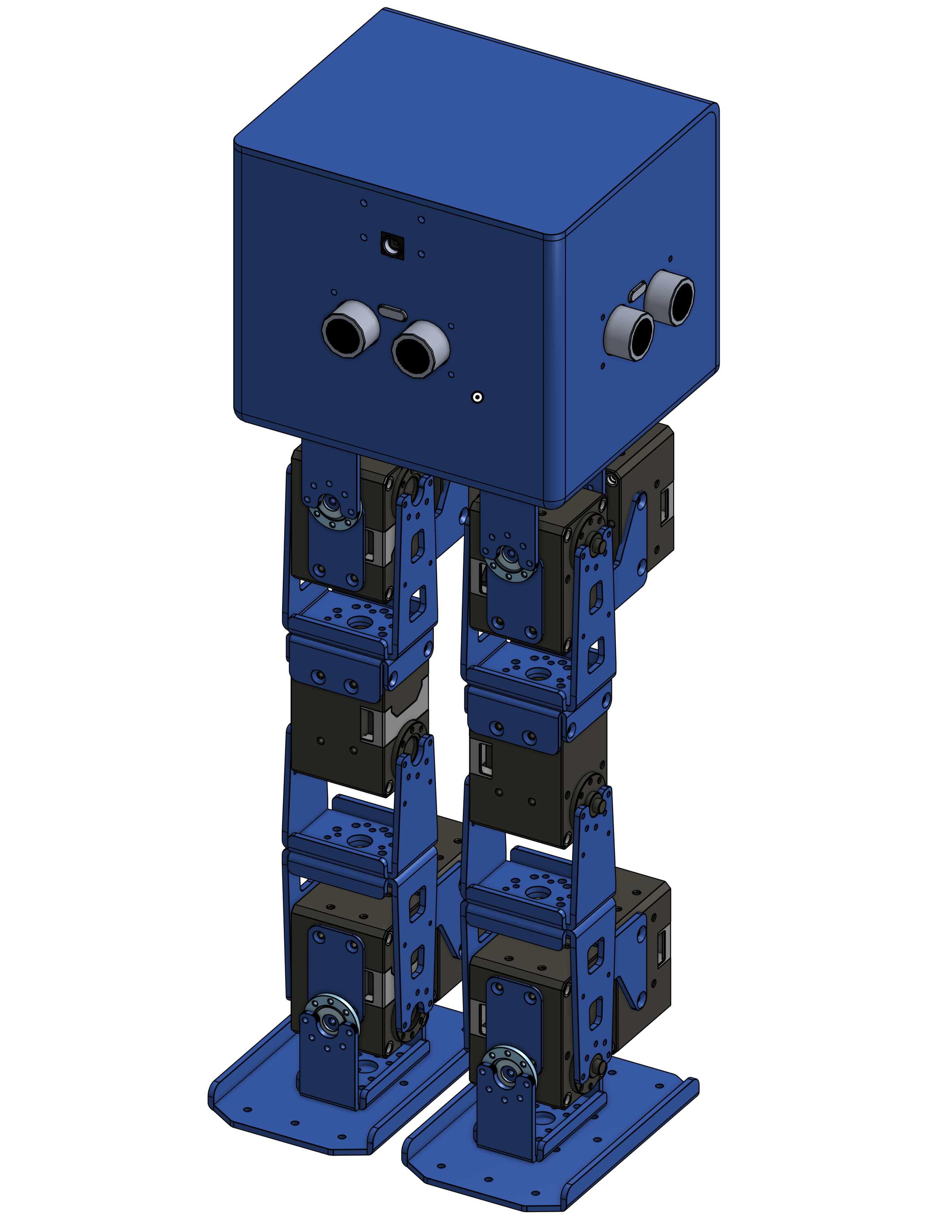
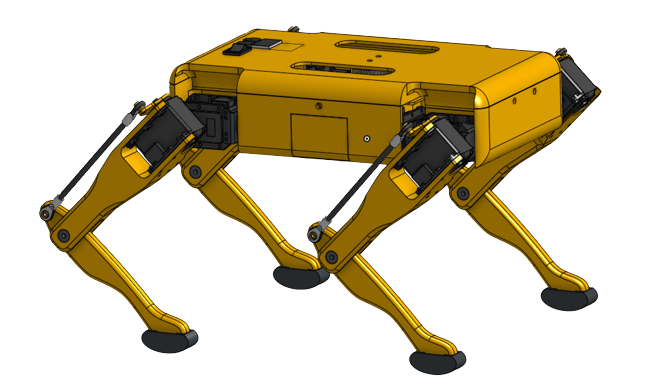
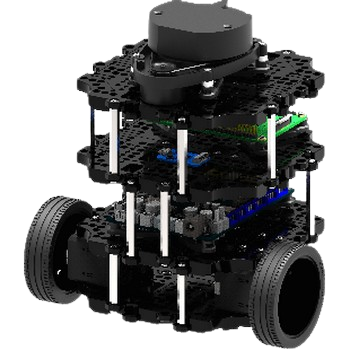
Mobile Robotics
Creatively present diversities of application in robotic platforms to be used on national soil.
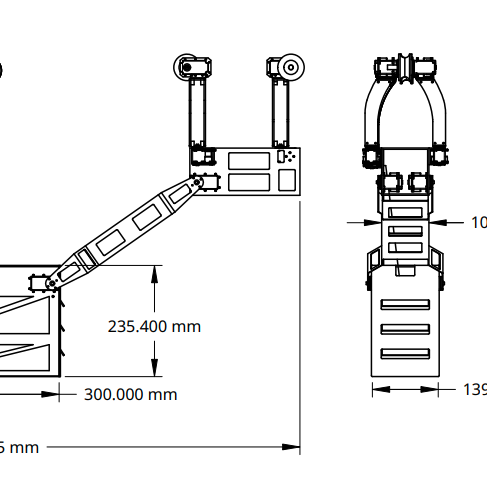
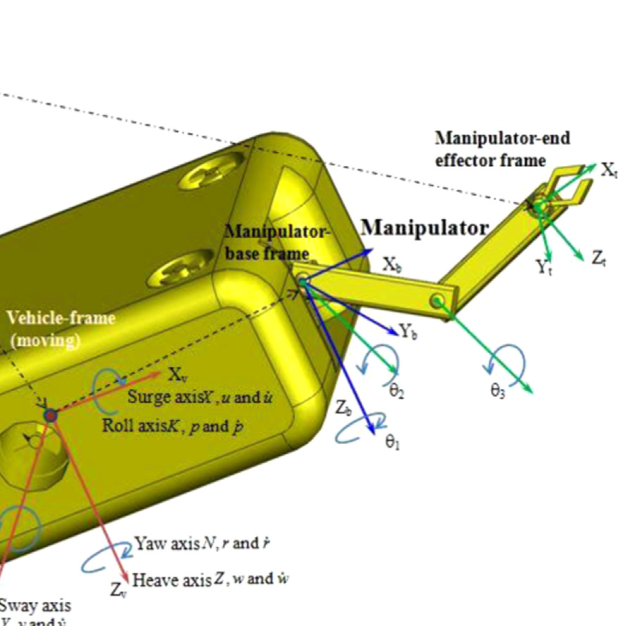
Manipulators
This line of research is focused on developing solutions for trajectory planning that suffer disturbances at the base of the manipulators.
Reliability
In this research, the aim is to autonomously implement reliability concepts aiming at fault tolerance in robotic systems.